Proteus Launch and Recovery System (LARS)
Part of the Autonomous Synchronised Stabilised Platform (ASSP) Project
In the future, Autonomous Surface Vessels (ASVs) will play an important role in servicing and repair of offshore installations for wind energy generation and hydrocarbon production. ASVs can operate around the clock in all but the most extreme weather conditions and, being unmanned, savings can be made by eliminating accommodation and equipment related to human safety. However, in order to carry out useful intervention tasks, ASVs need autonomous tools and manipulators.
STL are developing a ship-based multi-axis robotic arm with financial support from the Marine Challenge Fund (part of the ERDF’s European and Structural Funds Growth Programme 2014 – 2020) which was set up to boost marine innovation in Cornwall.
The arm, known as Proteus, will enable Autonomous Surface Vessels (ASVs) to execute intervention tasks – e.g. equipment transfers, survey and inspection, or launch and recovery operations. Space-stabilisation technology as used in STL’s Neptune personnel access system will be further developed to permit synchronous-stabilisation between two moving platforms, such as an ASV and another vessel, a floating wind-turbine, a wave-energy converter, or other target with wave-induced motion.
A stabilised robotic arm will also find applications on-board manned vessels. For example, launch and recovery of underwater ROVs and AUVs is labour-intensive and potentially hazardous to personnel and the equipment itself. A robotic arm could increase efficiency, safety, availability, and expand the weather window for operations.

Photo Credit: NOAA Photo Library (CC Licence)
Progress
Keep an eye on our NEWS page for updates.

Resources/Knowledge base
In September 2019, Submarine Technology Limited (STL) and the Southwest Chapter of The Society for Underwater Technology (SUT) hosted a free workshop exploring the application of robotics in marine operations and their role as an enabling technology for manned and autonomous vessels.
Personnel from STL and the University of Plymouth presented results from the R&D programme together with naval architecture studies and market research findings. The application of robotics to marine operations and its role as an enabling technology for autonomous surface vessels was explored.
A pdf copy of the workshop agenda may be downloaded by clicking here.
The topics discussed at the workshop are listed below for reference. As part of our commitment to publish the results of our ASSP Project, we’ve made copies of the presentations available for download. To download, just click on the relevant topic title.
[Please note that most of the presentations are PowerPoint slide shows. To see all the information, including animations and graphics, it’s important that you ‘play’ the slide show rather than just viewing in edit mode]:-
| Topic | Speaker |
| Autonomous vessels and robotics | Neil Farrington (ORE Catapult) |
| Overview of the ship-based robotics R&D programme | David Kirkley (STL) |
| Test facilities for ship-based robotics | Peter Back (STL) |
| Robotic arm design | Mike Paton (STL) |
| Control System Design – Overview | Lewis Richards (STL) |
| Control System Design – Sensors | Peter Back (STL) |
| Naval Architecture Studies | Simon Hindley (SOLIS Marine Engineering Ltd) |
| Market Research | Paul Weston (Weston Marine Consultancy Ltd) |
| Autonomous systems | Philipp Thies (University of Exeter) |
| Autonomous marine applications | Alex Whatley (University of Plymouth) |
Other Information
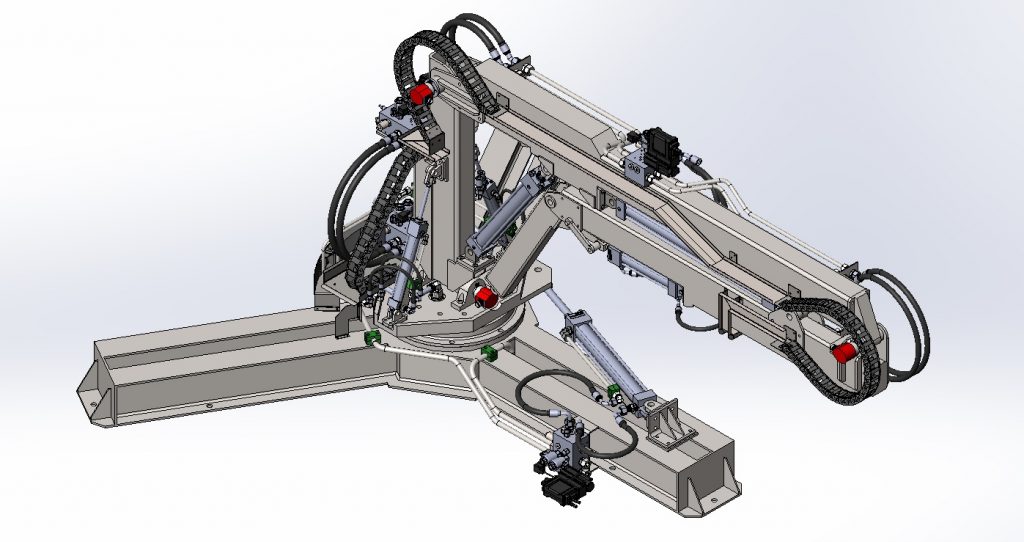
A 3D CAD model of the ASSP RDU may be downloaded by clicking on the image below. Due to file size restrictions, the model is a Solid Works Part file. However, if you’d like a copy of the full mated assembly, please contact us.
Presentations were made at the All-Energy 2019 conference in Glasgow during May and at the Seawork 2019 ASV Conference in Southampton during June. These were at a relatively early stage of the ASSP project and had the aim of alerting interested parties to the work. Copies of the presentations are available for download by clicking on the links below:-
| Event | Speaker |
| All-Energy 2019 Conference, Glasgow | David Kirkley (STL) |
| Seawork 2019 ASV Conference, Southampton | David Kirkley (STL) |
Recruitment
Please refer to the news page