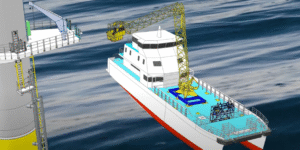
Developed by STL Research, the Neptune 20M Personnel Access System (PAS) is designed to allow safe and timely access to normally unmanned offshore installations for maintenance personnel and engineers, thereby reducing maintenance costs and increasing availability.
Motion-compensated personnel-access system (PAS) and light crane.
The Neptune 20M system enables transfer of personnel with equipment or cargo from a vessel via a gondola, to a fixed or floating offshore structure with full (6DoF) motion-compensation to remove wave induced motions, with the payload arriving at the target structure with no relative movement between them.
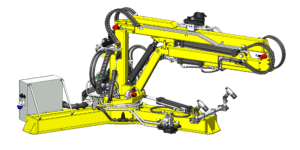
Ship-Based Robotic Arm for Autonomous Launch And Recovery (LAR) Operations.
The Proteus Launch and Recovery Systems with integrated machine vision, are innovative, stand-alone, deck mounted solutions, that enable the safe launch and recovery of autonomous or semi-autonomous marine equipment; such as ROVs, AUVs and ASVs, under local or remote control.
Should you require any additional information, please contact us here
A variant of the classic ‘Stewart Table’ or ‘Hexapod’ and is similar to those found in flight simulators. It is commercially available for use for third party work.
About Us
STL Research is a consultancy, design, development and project implementation group, specialising in motion compensation, control and automation for the offshore and sub-sea industries.
Initially operating from Aberdeen and now based in Cowes, STL Research has been involved in many leading edge projects within the offshore and subsea markets. Two key focus areas are safe and efficient personnel access (Neptune), and the safe launch and recovery of autonomous marine equipment under local or remote control (Proteus).
The Neptune 20M Personnel Access System enables transfer of personnel with equipment, or cargo, from a vessel via a gondola, to a fixed or floating, offshore structure with full (6DoF) motion-compensation to remove wave-induced motion.
Proteus is an innovative, stand-alone, deck mounted launch and recovery system, which uses computer vision to automatically synchronise movement of the interchangeable coupling tool with the target, to eliminate wave-induced motions, simplifying attachment and safe retrieval of ROVs, AUVs and ASVs.
Legacy projects include diving systems, hyperbaric lifeboats, HP/HT valves, well head control & monitoring systems and automatic ultrasonic NDT.
Systems & Services
Neptune Offshore Personnel Access System
You can find a PDF copy of the Neptune datasheet on our Downloads page.
Neptune 20M Personnel Access System
The Neptune system enables transfer of personnel with equipment or cargo, from a vessel via a gondola, to a fixed, or floating, offshore structure with full (6DoF) motion-compensation to remove wave-induced motions.
If the target is fixed and stationary, vessel induced motion is removed from the gondola, and it is said to be “space stabilised”. If the target is floating and also subject to wave action, the gondola and target motions are matched, and it is said to be “synchronised”.
PRINCIPLE:
A stand-alone system that can be installed on any suitable vessel and operates without requiring any vessel services or data, except for the optional use of ship-generated electrical power.
DESCRIPTION:
The system has five ‘joints’ and these are highlighted in Figure 1. The foundation, is fixed to the vessel deck and therefore moves with the vessel.
Figure 1: Overview of the Neptune 20M System
Slew:
Rotates the entire Neptune system around the vertical axis.
Gimbal:
Keeps the arms in a vertical plane as the vessel rolls and pitches.
Shoulder:
Rotates the upper arm relative to the gimbal top frame.
Elbow:
Rotates the forearm relative to the upper arm.
Wrist:
Rotates the gondola relative to the forearm to keep the floor horizontal.
The function of each joint is described in the table above.
MOTION MEASUREMENT:
When in space-stabilised mode, the vessel deck movement is measured in real time using an integral Position and Attitude Sensing System (PASS). This obtains position from Global Navigation Satellite System (GNSS) satellites using Real Time Kinematic (RTK) techniques to enhance precision. This position, along with data from an Inertial Navigation System (INS), is used to generate a PASS output that the Neptune controllers use to calculate joint angles to space-stabilise the gondola.
In synchronised mode (i.e. gondola motion matched with a moving target) a Remote Sensing System (RSS) measures the motion of the floating target. The Neptune controllers use RSS data to derive the joint angles needed to synchronise gondola and moving target motions.
OPERATING WINDOW:
Simulations (Figure 2), and sea trials (Figure 3) have proven Neptune capable of operating at Significant Wave Heights (Hs) up to 2m even on smaller vessels, for example on a 54m mono hull and a 36m catamaran.
SPECIFICATION:
Height capability above deck:
20.4m when on a standard mounting frame
Typical transfer height:
17m above sea level
The operating height can be increased by mounting the unit on a pedestal.
Reach from centre of slew axis:
greater than 21m
Vessel stand-off:
greater than 10m (typically 14 to 17m)
Slewing capability:
295° (typically limited to 233º depending on installation)
Motion compensation accuracy:
Better than ± 10 cm
Maximum system individual motion compensation ability:
Heave:
5 m
Roll:
± 10°
Pitch:
± 10°
Yaw:
± 147.5°
Sway:
± 2 m Sway and Surge: in addition to
Surge:
± 2 m a 3m diameter watch keeping circle
Weight
11.3 t (excluding hydraulic power unit)
Foundation footprint
2.5 m x 3 m
Hydraulic power unit
2 x 120 kW (diesel or electric)
Gondola capacity
3 people including PPE and tools
Payload in personnel mode
300kg maximum
Payload in crane mode
700kg maximum
NOTES:
1. Motion compensation figures can be achieved with wave periods as short as 5 seconds.
2. Computer modelling, with ship-motion predictions, can be carried out to determine performance limits for a specific vessel if required.
Figure 2: Neptune 20M Simulation and Modelling
Figure 3: Neptune 20M prototype during sea trials
PRINCIPAL DIMENSIONS:
Figure 4 shows a typical installation on a Fast Crew Transfer Vessel with an aluminium hull. The components shown in blue are the deck mounting frame and stowage cradle.
Figure 4: Principal Dimensions of a Typical Installation
FEATURES:
Low weight and a small footprint means the Neptune System can be easily accommodated on smaller vessels meaning savings in cost and CO2 emissions
The Neptune System can easily be retrofitted. Typically a mounting frame picks up on existing deck mounting points that are normally reserved for standard shipping containers
The purchase cost is a fraction of traditional stabilised gangways
The Neptune System exerts no pressure on the target structure. The personnel carrying gondola hovers near the target with only the passive ramp making sliding contact
SAFETY:
Design for safety is a key principle and is achieved in the following ways:
No single failure causes a hazardous situation
All critical components are duplicated with automatic switch-over (redundancy)
At the landing point, the stand off position is controlled by proximity sensors which keep the gondola at a safe distance from the landing platform
Personnel in gondola are seated with safety harnesses
No dependence on ship’s systems or data beyond vessel station-keeping
CERTIFICATION:
Designed to the requirements of DNV-ST-0358 Standard for Offshore Gangways and
DNV-ST-0378 Standard for Offshore and Platform Lifting Appliances.
Certification available to this or other equivalent classification society standards.
Conforms to HSE recommended ± 10 cm movement envelope.
OPERATING ENVELOPE:
Figure 5: Neptune 20M Operating Envelope
Proteus
Proteus – Launch and Recovery System (LARS)
Originally Part of the Autonomous Synchronised Stabilised Platform (ASSP) Project
With financial support from the Marine Challenge Fund (part of the ERDF’s European and Structural Funds Growth programme 2014-2020), STL Research have developed a multi-axis robotic arm for ship-based deployment.
The arm, known as Proteus, is designed to simplify the launch and recovery operations of AUVs, ROVs and ASVs, by automatically tracking their position and stabilising its connection tool to compensate for any wave induced vessel and target motion. Proteus makes this process faster and safer for all involved and can even be installed and used on autonomous surface vessels (ASVs) to enable them to execute intervention tasks – e.g. equipment transfers, survey and inspection, or launch and recovery operations.
Our Proteus Launch and Recovery Systems now have their own dedicated site, which can be visited by clicking here, or on the image below.
The Proteus development unit during construction
Motion Platform
Motion Platform
Motion Simulation Services
STL’s six degree of freedom (6DOF) Motion Platform is a variant of the Stewart Table or Hexapod and is similar to those found in flight simulators.
It’s commercially available for hire. Please contact us here if you would like to know more.
Description
The Motion Platform top frame may be moved in a way that simulates the motion of the deck of a vessel at sea. Equipment intended for marine use may be mounted on the top frame of the platform in order to evaluate it’s performance when subjected to the pitch, roll, yaw, heave surge and sway motions normally experienced at sea.
The top and bottom frames of the Motion Platform are mechanically connected by six ‘legs’. Each ‘leg’ consists of a hydraulic cylinder with an associated position sensor attached. The position sensors monitor the extension of the cylinder rods.
Pressurised oil is supplied to the hydraulic cylinders via dedicated Digital Servo-proportional Directional Valves. In this way, the extension of the cylinders may be independently controlled.
Control
The Motion Platform may be controlled using the following methods:
Digital Hand Control (Open Loop). Digital position demands are provided by ‘extend/retract’ toggle switches mounted on a simple switch panel known as the ‘Digital Hand Controller’ (DHC). The directional valves are operated in an open loop ‘Jog’ mode.
Analogue Hand Control (Closed Loop). Analogue position demands are provided by an Analogue Hand Controller (AHC). Control is further enhanced using position feedback derived from the position sensors mounted on each hydraulic cylinder. The directional valves are operated in a closed loop ‘Normal’ mode.
Computer Control (Closed Loop). Analogue position demands are provided by a Digital-to-Analogue Converter (DAC) connected to a PC running STL’s Motion Platform Control software. The directional valves are operated in a closed loop mode.
Methods of controlling the motion platform: Left to Right – DHC, AHC, Computer + DAC
Research and Development
Research & Development / Intellectual Property Development
STL Research are committed to taking innovative technological concepts, developing them into a practical and economically viable state, and creating commercially successful ventures using the technologies.
Specialising in Motion Compensation, Control & Automation for maritime and offshore industries, STL is ideally placed to take innovative & cutting-edge sub-sea and offshore technology IP from its infancy, to eventual IPO or trade sale.
If you would like further information or are interested in our services, please contact us here.
Gallery
Careers
We are not currently recruiting. However, if you are interested in future career opportunities at STL Research, please contact us using the details below:-
Peter Back
Technical Director
STL Research
peter@stlres.co
On Thursday 24th July 2025, Peter Back and Phil Vosper welcomed Jason Liu and Arnold Li, from OceanAlpha (www.oceanalpha.com) to the STL Research (www.stlres.co) office in Cowes. In discussions with their …
STL Research are pleased to announce the posting of a simulation of the Neptune 20M Offshore Personnel Access System (PAS) on their YouTube channel. The simulation is intended as an …
STL are pleased to announce the launch of their newly redesigned website, dedicated to the Proteus Launch and Recovery System (LARS). Stay up to date with our latest news over …